Mars-3
Den stabile version blev tjekket ud den 17. august 2022 . Der er ubekræftede ændringer i skabeloner eller .| Mars-3 | |
|---|---|
| Fabrikant | NPO dem. Lavochkin |
| Operatør | USSR rumprogram |
| Opgaver | udforskning af Mars fra kredsløb og overflade |
| Satellit | Mars |
| affyringsrampe | Baikonur |
| løfteraket | Proton-K / Blok D |
| lancering | 28. maj 1971 18:26:30 MSK |
| Går ind i kredsløb | november 1971 |
| Deorbit | 23. august 1972 |
| COSPAR ID | 1971-049A |
| SCN | 05252 |
| specifikationer | |
| Vægt | 4625 kg (orbital station: 3625 kg, automatisk Mars station: 355 kg) |
| Orbitale elementer | |
| Excentricitet | 0,95548 |
| Humør | 60° |
| Omløbsperiode | 12.79 dage |
| apocenter | 211.400 km |
| pericenter | 1500 km |
| Lander på et himmellegeme |
2. december 1971 13:52 UTC |
| Landingskoordinater | 45°S sh. 158°V / 45 ° S sh. 158°V d. / -45; -158 |
| Mediefiler på Wikimedia Commons | |
"Mars-3" er en sovjetisk automatisk interplanetarisk station (AMS) af fjerde generation af Mars rumprogram . En af de tre AMC'er i M-71-serien. Mars-3-stationen er designet til at udforske Mars både fra kredsløb og direkte på planetens overflade. AMS bestod af en orbital station - en kunstig Mars satellit og et nedstigningskøretøj med en automatisk Mars station.
Verdens første bløde landing af et nedstigningskøretøj på Mars og den eneste inden for sovjetisk kosmonautik [1] . Datatransmission fra den automatiske Martian-station begyndte 1,5 minutter efter den landede på Mars' overflade, men stoppede efter 14,5 sekunder.
Specifikationer
- Masse AMC ved lancering: 4625 kg [2]
- Masse af orbitalstationen ved opsendelse: 3625 kg
- Køretøjets masse ved nedstigning: 1000 kg
- Massen af nedstigningskøretøjet, når det kommer ind i Mars atmosfære: ingen information fra autoritative kilder
- Masse af automatisk Mars-station: 355 kg (efter blød landing på Mars)
Konstruktion
AMS "Mars-3" blev udviklet ved NPO opkaldt efter S. A. Lavochkin , den bestod af en orbitalstation - en kunstig satellit og et nedstigningskøretøj med en automatisk Mars-station [2] . Layoutet af AMS blev foreslået af en ung designer V. A. Asyushkin. Styresystemet, der vejer 167 kg og et strømforbrug på 800 watt, er udviklet og fremstillet af Research Institute of Automation and Instrumentation .
Grundlaget for orbitalstationen var en blok af tanke af hovedfremdrivningssystemet med en cylindrisk form. Solpaneler , en meget retningsbestemt parabolantenne, radiatorer til termisk kontrolsystem , et nedstigningskøretøj og et instrumentrum blev knyttet til denne blok . Instrumentrummet var en toroidformet forseglet beholder, der rummede det indbyggede computersystem , navigations- og orienteringssystemer og andre systemer. Udenfor var astronavigationsinstrumenter fastgjort til instrumentrummet.
Den interplanetariske station er udstyret med et autonomt rumnavigationssystem, der ikke har nogen analoger i verden. Systemet brugte et optisk goniometer. 7 timer før ankomsten til Mars, skulle enheden foretage den første måling af Mars' vinkelposition i forhold til basiskoordinatsystemet. Måledataene blev overført til styresystemets indbyggede computer, som beregnede den tredje korrektionsvektor, der var nødvendig for at overføre stationen til den nominelle bane. Baseret på resultaterne af beregningerne udstedte rumfartøjets kontrolsystem kommandoer til at udføre korrektionen uden interferens fra Jorden. Prototypen på kontrolsystemet var computersystemet på måneskibet, hvis kerne var S-530-bordcomputeren baseret på elementer af typen " Tropa " [3] .
Nedstigningskøretøjet var en konisk aerodynamisk bremseskærm med en diameter på 3,2 meter og en vinkel i toppen på 120 grader, der dækkede den automatiske Mars-station (tæt på sfærisk form). Oven på den automatiske Mars-station var der fastgjort en toroidformet instrument-faldskærmsbeholder med fastspændingsstropper, som indeholdt udstødnings- og hovedfaldskærme og de nødvendige instrumenter for at sikre tilbagetrækning, stabilisering, nedstigning fra kredsløb nær Mars, opbremsning og blød repos og en forbindelsesramme. På rammen er der en fastbrændstofmotor til at overføre nedstigningskøretøjet fra en flyvende bane til en indkommende bane og enheder af et autonomt kontrolsystem til stabilisering af nedstigningskøretøjet, efter at det er løsnet fra orbitalstationen. En vimpel med billedet af USSR's statsemblem blev også fastgjort om bord på nedstigningskøretøjet . Før flyvningen blev nedstigningskøretøjet steriliseret.
Den automatiske Martian-station inkluderede PrOP-M- roveren .
Flyvning
Stationen blev opsendt fra Baikonur Cosmodrome ved hjælp af en Proton-K løfteraket med en yderligere 4. trin - øvre trin D den 28. maj 1971 kl. 18:26:30 Moskva-tid . I modsætning til AMS fra den forrige generation blev Mars-3 først opsendt i en mellemliggende bane af en kunstig jordsatellit og derefter overført til en interplanetarisk bane af boosterblokken D.
Flyveturen til Mars varede mere end 6 måneder. Den 8. juni og november 1971 blev banekorrektioner gennemført med succes. Indtil tidspunktet for indflyvning til Mars forløb flyvningen i henhold til programmet. Ankomsten af stationen til planeten faldt sammen med en stor støvstorm . Støvstormen begyndte den 22. september 1971 i den lyse Noachis-region på den sydlige halvkugle. Den 29. september dækkede to hundrede grader i længdegrad fra Ausonia til Thaumasia. 30. september lukkede den sydlige polarkappe. En kraftig støvstorm hæmmede videnskabelige undersøgelser af Mars' overflade fra de kunstige satellitter " Mars-2 ", "Mars-3", " Mariner-9 ". Det var først den 10. januar 1972, at støvstormen stoppede, og Mars fik et normalt udseende.
Den 2. december 1971 blev den tredje banekorrektion gennemført. Korrektionen blev udført ved hjælp af on-board automation uden brug af jordfaciliteter. Stationens autonome astro-orienteringssystem sikrede dens orientering og bestemte stationens position i forhold til Mars. De opnåede data blev automatisk indtastet i den elektroniske computer ombord, som beregnede størrelsen og retningen af den korrigerende puls og udstedte de nødvendige kommandoer til korrektionen. Efter den tredje korrektion gik stationen ind i en bane, der passerede i en afstand af 1500 km fra Mars overflade.
Mars 3-landeren lavede verdens første bløde landing på Mars den 2. december 1971. Landingen begyndte efter den tredje korrektion af den interplanetariske flyvevej og adskillelse af nedstigningskøretøjet fra orbitalstationen. Før adskillelse var Mars-3-stationen orienteret således, at nedstigningskøretøjet efter adskillelse kunne bevæge sig i den nødvendige retning. Adskillelsen fandt sted klokken 12:14 Moskva-tid den 2. december, hvor AMS fløj op til planeten, inden banestationen var ved at decelerere og bevæge sig ind i en Mars-satellits kredsløb. Efter 15 minutter blev motoren med fast drivmiddel i nedstigningskøretøjets overgang fra flyby-banen til rendezvous-banen med Mars aktiveret. Efter at have modtaget en ekstra hastighed svarende til 120 m/s (432 km/t), kørte nedstigningskøretøjet til det anslåede indsejlingspunkt i atmosfæren. Det truss-monterede kontrolsystem indsatte derefter nedstigningskøretøjet med et konisk trækskjold fremad i kørselsretningen for at sikre en korrekt orienteret genindtræden i planetens atmosfære. For at holde nedstigningskøretøjet i denne orientering under flyvningen til planeten blev der udført gyroskopisk stabilisering. Spindingen af apparatet langs den langsgående akse blev udført ved hjælp af to små faste drivmiddelmotorer installeret på periferien af bremseskærmen. Trusset med styresystemet og oversættelsesmotoren, nu unødvendigt, blev adskilt fra nedstigningskøretøjet.
Flyveturen fra adskillelse til re-entry varede omkring 4,5 timer. På kommando fra programtidsenheden blev to andre fastdrivende motorer, også placeret i periferien af bremseskærmen, tændt, hvorefter nedstigningskøretøjets rotation stoppede. Klokken 16.44 kom nedstigningskøretøjet ind i atmosfæren i en vinkel tæt på den beregnede, med en hastighed på omkring 5,8 km/s, og aerodynamisk opbremsning begyndte. For enden af den aerodynamiske bremsesektion, stadig ved supersonisk flyvehastighed, på kommando af overbelastningssensoren, ved hjælp af en pulvermotor placeret på dækslet til pilotsliskerummet, blev pilotslisken indført. Efter 1,5 blev torus faldskærmsrummet skåret ved hjælp af en aflang ladning, og den øverste del af rummet (låget) blev taget væk fra nedstigningskøretøjet af en pilotskakt. Coveret introducerede til gengæld hovedfaldskærmen med en revet kuppel. Hovedfaldskærmens liner var fastgjort til en flok motorer med fast drivmiddel, som allerede var fastgjort direkte til nedstigningskøretøjet.
Da enheden bremsede ned til transonisk hastighed, blev der, efter signalet fra tidsprogramapparatet, udført en revning - hovedfaldskærmens baldakin var helt åbnet. Efter 1-2 s blev den aerodynamiske kegle droppet, og radiohøjdemålerens antenner på blødlandingssystemet åbnede. Under nedstigningen på en faldskærm i flere minutter faldt bevægelseshastigheden til omkring 60 m/s (216 km/t). I en højde af 20-30 meter, på kommando af radiohøjdemåleren, blev bremsemotoren til en blød landing tændt. Faldskærmen blev på dette tidspunkt omdirigeret til siden af en anden raketmotor, så dens kuppel ikke ville dække den automatiske Mars-station. Efter nogen tid slukkede blødlandingsmotoren, og nedstigningskøretøjet, adskilt fra faldskærmsbeholderen, sank til overfladen. Samtidig blev en faldskærmscontainer med blød landingsmotor omdirigeret til siden ved hjælp af lavtryksmotorer. På tidspunktet for landing beskyttede en tyk skumbelægning stationen mod stødbelastning. Landing blev udført mellem områderne Electris og Phaetontia. Landingspunktets koordinater 45° S. sh. 158°V / 45 / -45; -158° S sh. 158°V på den flade bund af det store krater Ptolemæus , vest for Reutov-krateret, og mellem de små kratere Belev og Tyuratam [4] .
Blød landing på Mars er et komplekst videnskabeligt og teknisk problem. Under udviklingen af Mars-3-stationen blev relieffet af Mars overflade dårligt undersøgt, der var meget lidt information om jorden. Derudover er atmosfæren meget sjælden, kraftig vind er mulig. Designet af den aerodynamiske kegle, faldskærme og blød landingsmotor blev valgt under hensyntagen til drift under en lang række mulige nedstigningsforhold og karakteristikaene ved Mars-atmosfæren, og deres vægt er minimal.
Inden for 1,5 minutter efter landing forberedte den automatiske Martian-station sig til arbejde og begyndte derefter at sende et panorama af den omgivende overflade, men efter 14,5 sekunder stoppede udsendelsen. AMS transmitterede kun de første 79 linjer af foto-tv-signalet (højre kant af panoramaet). Det resulterende billede var kaotisk arrangerede hvide, grå og sorte striber, hvorpå ikke en eneste detalje kunne afsløres.
Efterfølgende blev forskellige årsager til den pludselige afslutning af signalet fra overfladen antaget: en farlig horisontal hastighed under landing (Mars-3 kom ind i atmosfæren under en planetarisk støvstorm, når vindhastigheden nær overfladen ifølge Mariner-9, var mere end 140 meter i sekundet [5] ), koronaudladning i senderantennerne på grund af en kraftig støvstorm [6] , beskadigelse af batteriet.
Orbitalstationen udførte efter adskillelsen af nedstigningskøretøjet deceleration den 2. december 1971 og gik ind i en off-design bane af en kunstig Mars satellit med en omløbsperiode på 12 dage 16 timer 3 minutter (en bane med en omløbsperiode 25 timer var planlagt). Der er ingen information fra autoritative kilder om årsagerne til at gå ind i et off-design kredsløb. Efterfølgende blev der antaget forskellige årsager: utilstrækkeligt testet software, derfor viste motorens driftstid under bremsning sig at være mindre end den beregnede, øget brændstofforbrug under banekorrektioner forårsaget af unormal drift af løfteraketten.
Den 23. august 1972 annoncerede TASS færdiggørelsen af flyveprogrammet. "Stationen har udført et omfattende program for udforskning af Mars i mere end 8 måneder. I løbet af denne tid lavede stationen 20 omdrejninger rundt om planeten. AMS fortsatte forskningen indtil udtømningen af nitrogen i orienterings- og stabiliseringssystemet.
I 2002 blev der publiceret en artikel i tidsskriftet Space Research, hvori følgende blev udtalt om arbejdet med Mars-3 i kredsløb nær Mars: ”Infrarød radiometri, fotometri, målinger af atmosfærens sammensætning, magnetfelt og plasma blev udført i fire måneder” [7 ] .
Udviklerne af foto-tv-installationen (FTU) brugte den forkerte model af Mars, hvorfor de forkerte eksponeringer blev valgt. Billederne viste sig overeksponerede, næsten helt ubrugelige. Efter flere serier af billeder (hver med 12 billeder) blev foto-tv-installationen ikke brugt [2] .
Patentvurderingsenhed
PrOP-M er verdens første rover. Formål - måling af jorddensitet. I løbet af fem år arbejdede 150 mennesker på enheden hos VNIITransmash , ledet af designeren Alexander Leonovich Kemurdzhian . De samme PrOP-M rovere var en del af de automatiske Mars-stationer, der blev leveret til overfladen af Mars i 1971 af nedstigningskøretøjer fra de sovjetiske interplanetariske stationer Mars-2 og Mars-3. Mars 2-landeren styrtede ned ved landing. Mars 3-landeren lavede en blød landing den 2. december 1971, men signalet fra Mars-stationen gik tabt efter 14,5 sekunder. Information fra roveren blev ikke modtaget.
Find et landingssted
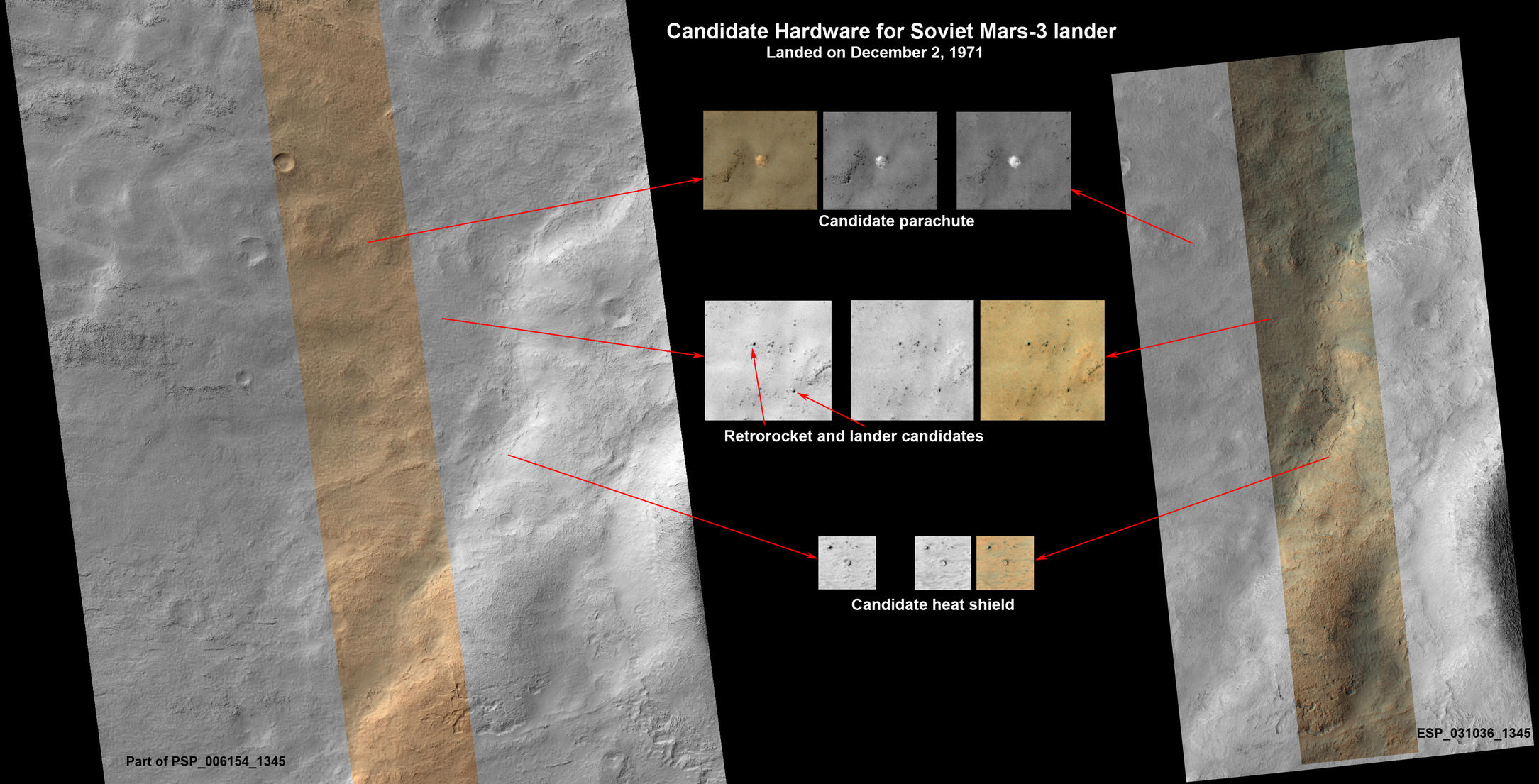
Som en del af Mars Reconnaissance Orbiter -flyveprogrammet blev der gjort forsøg på at finde landingsstedet for Mars-3-apparatet sammen med søgningen efter andre automatiske Mars-stationer opsendt af menneskeheden i det 20. århundrede. I lang tid kunne stationen ikke findes i de forventede landingskoordinater. I 2012-2013 gennemgik og analyserede rumentusiaster billeder i høj opløsning af stationens foreslåede landingszone, som blev taget i 2007 af Mars Reconnaissance Orbiter -satellitten [8] . Som et resultat blev objekter, der er elementer i Mars-3 nedstigningskøretøjet, identificeret. Billederne identificerede en automatisk Mars-station, en faldskærm, en blød landingsmotor og et aerodynamisk trækskjold. I deres søgning blev de assisteret af specialister fra NASA , GEOKHI , RKS , NPO dem. Lavochkin [1] [9] [10] [11]
Sammenligning med AMS Mariner 9
- Den termiske stråling af jorden, hvorved dens struktur blev bestemt, blev undersøgt ikke kun i det infrarøde, men (i modsætning til Mariner-9) og i radioområdet [12] .
- Globale fotometriske profiler af Mars er opnået i mange spektralområder. Mariner 9 udførte ikke sådanne målinger [12] .
- Vandindholdet i atmosfæren blev bestemt. Måleteknikken brugte det område af spektret, hvor reflekteret solstråling dominerer, snarere end termisk stråling, og intensiteten af båndet er næsten uafhængig af den vertikale temperaturfordeling. Sådan en teknik er i princippet mere perfekt end den teknik, der bruges på Mariner-9 [12] .
Landingssteder for robotstationer på Mars

![]()
![]()
Se også
- " Mars 1971C " er en sovjetisk automatisk interplanetarisk station af fjerde generation fra M-71-serien, designet til at udforske Mars fra en kunstig satellitbane.
- " Mars-2 " er en fjerde generation af sovjetisk AMS fra M-71-serien, designet til at udforske Mars både fra en kunstig satellitbane og direkte på planetens overflade.
Noter
- ↑ 1 2 Den sovjetiske kosmonautiks stolthed blev fundet på Mars . Hentet 26. juni 2020. Arkiveret fra originalen 28. september 2016.
- ↑ 1 2 3 Mars -71 (Mars-2 og Mars-3) (utilgængeligt link) . NGO's hjemmeside Lavochkin. Hentet 17. februar 2014. Arkiveret fra originalen 10. maj 2013.
- ↑ A. G. Glazkov Space Odyssey indbygget computer S-530 XXXVIII Akademiske læsninger om astronautik dedikeret til minde om akademiker S. P. Korolev og andre fremragende videnskabsmænd - pionerer inden for rumudforskning 2014 s. 115 Arkiveret 15. april 2015 på Wayback Machine .
- ↑ Navnene på to russiske byer dukkede op på kortet over Mars | RIA Novosti Arkiveret 9. august 2013 på Wayback Machine .
- ↑ Carl Sagan. Kosmos: universets, livets og civilisationens udvikling / Pr. fra engelsk. A. G. Sergeeva. - Sankt Petersborg. : Amphora, 2008. - 368 s. — (Dynastiets Bibliotek). — ISBN 978-5367008296 .
- ↑ Perminov, 2018 .
- ↑ V. I. Moroz, V. T. Huntress, I. L. Shevalev. Planetekspeditioner i det XX århundrede // Rumforskning: tidsskrift. - 2002. - T. 40 , nr. 5 . - S. 451-481 . — ISSN 0023-4206 .
- ↑ Vitaly Egorov. Hvordan vi søgte efter Mars-3 . Habrahabr (11. april 2013). Hentet 11. april 2013. Arkiveret fra originalen 17. april 2013.
- ↑ Guy Webster. NASA Mars Orbiter-billeder kan vise 1971 Soviet Lander (engelsk) (link ikke tilgængeligt) . NASA (11. april 2013). Hentet 11. april 2013. Arkiveret fra originalen 17. april 2013.
- ↑ NASA Mars Orbiter-billeder kan vise 1971 Sovjet Lander . Hentet 2. januar 2020. Arkiveret fra originalen 17. april 2019.
- ↑ 1 2 Webster, Guy NASA Mars Orbiter-billeder kan vise 1971 Sovjet Lander . NASA (11. april 2013). Hentet 12. april 2013. Arkiveret fra originalen 29. juni 2017.
- ↑ 1 2 3 Nyt om Mars. — M .: Mir, 1974.
{kind=link}
{kind=link}
Litteratur
- V. Smirnov. Signal fra Mars. Rapport fra Center for Deep Space Communications . Sandhed (8. december 1971). Hentet: 12. december 2016.
- V. Moroz, L. Xanfomality. Fire måneder i Mars-kredsløbet // Bulletin of the Academy of Sciences of the USSR: journal. - 1972. - S. 10-25 .
- Nyt om Mars. — M .: Mir, 1974.
- Bronshten V. A. Planet Mars. — M .: Nauka, 1977.
- VG Perminov. The Difficult Road to Mars : A Brief History of Mars Exploration in the Soviet Union: [ eng. ] . - Franklin Classics Trade Press, 2018. - 86 s. — ISBN 0353299626 . — ISBN 978-0353299627 .
- Marov M.Ya, jægerinden W.T. Sovjetiske robotter i solsystemet: teknologier og opdagelser: [ rus. ] . - M. : Fizmatlit, 2017. - 611 s. — ISBN 978-5-9221-1741-8 .
Links
- Sovjetisk angreb på Mars (1971 - "Mars-2" og "Mars-3"). på YouTube
- AMC serie M-71 på hjemmesiden for NPO dem. Lavochkin
- Mars 3 på NASAs hjemmeside
- Uofficiel flash-film om Mars-3 flyvning
- Kort beskrivelse af design og flyvning af Mars-2, Mars-3
- Beskrivelse af design og flyvning af Mars-2, Mars-3
- [bse.sci-lib.com/particle015942.html Billede af Mars-3 i Great Soviet Encyclopedia]
- Kan dette være den sovjetiske landingssonde Mars-3?
- Fundet "Mars-3"?!, Søg efter sovjetiske landere på Mars
| Udforskning af Mars med rumfartøj | |
|---|---|
| Flyvende | |
| Orbital | |
| Landing | |
| rovere | |
| Marshalls | |
| Planlagt |
|
| Foreslået |
|
| Mislykket | |
| Annulleret |
|
| se også | |
| Aktive rumfartøjer er fremhævet med fed skrift | |
| |
|---|---|
|
| |
| Køretøjer opsendt af en raket er adskilt af et komma ( , ), opsendelser er adskilt af et interpunct ( · ). Bemandede flyvninger er fremhævet med fed skrift. Mislykkede lanceringer er markeret med kursiv. | |