Passability Assessment Instrument - Mars ( PrOP-M ) - verdens første rover . De samme PrOP-M rovere var en del af de automatiske Mars-stationer, der blev leveret til overfladen af Mars i 1971 af nedstigningskøretøjer fra de sovjetiske automatiske interplanetariske stationer Mars-2 og Mars-3 .
"Roadability Evaluator - Mars" - en rover, forbundet med et 15-meter kabel til Mars-stationen. Stationens manipulator placerer roveren på et areal optaget af stationens tv-kamera. Ved hjælp af specielle sensorer kunne han bestemme, hvor forhindringen var - til højre eller til venstre, og selvstændigt beslutte, hvordan man bedst kunne omgå den. I løbet af fem år arbejdede 150 mennesker på enheden, ledet af designingeniør Alexander Kemurdzhian . Alt skete i en atmosfære af streng hemmelighedskræmmeri. Selv Kemurdzhians søn fandt først ud af, hvad hans far arbejdede på, efter at Mars-3-stationen gik ud i rummet og tog ProOP-M med sig i en speciel metal-"pote".
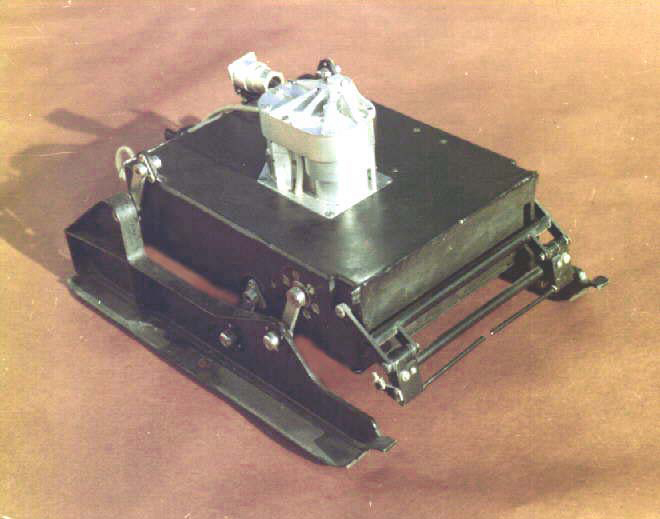
PrOP-M adskilte sig fra andre opsendte planetariske rovere ved sit bevægelsessystem . Enhederne skulle bevæge sig langs jorden ved hjælp af to ski placeret på siderne, hvilket hævede enheden lidt over overfladen . Et sådant system blev valgt på grund af manglen på information om Mars overflade [2] . De to tynde stænger foran er sensorer til at registrere forhindringer på vejen. Den mobile enhed kunne bestemme, hvilken side forhindringen var på, trække sig tilbage fra den og forsøge at omgå den. Hver 1,5 meter stoppede han for at bekræfte det korrekte bevægelsesforløb. Denne elementære kunstige intelligens var nødvendig for Mars mobile enheder, da signalet fra Jorden til Mars tager fra 4 til 20 minutter, hvilket er for lang tid for en mobil enhed: da kommandoerne ankom fra Jorden, kunne enheden allerede være ude af orden, kolliderer med en forhindring eller kæntrer.
Roveren har to videnskabelige instrumenter - et dynamisk penetrometer og et gamma-stråle densitometer . [3]
Det nøjagtige landingssted for stationen på Mars var ikke kendt i lang tid. Og først i 2013, 42 år efter landing, fandt entusiastiske bloggere ledet af astronomen Vitaly Egorov fra St. Petersborg, efter at have studeret flere hundrede fotografier af Mars-overfladen, ud af, at den hviler i bunden af Ptolemæus- krateret . Den unikke, verdens første rover [4] [5] blev også der .
Mere PrOP-M blev ikke opsendt til Mars. Årsagen til lukningen kendes ikke. Snart indskrænkede USSR midlertidigt hele Mars-programmet og skiftede til forskning i "Jordens søster" - Venus, rødglødende og indhyllet i giftig damp. Specialister fra VNIItransmash ydede også et stort bidrag til dem.
I dag er der kun fire Leningrad-rovere tilbage i verden. Den ene opbevares hos NPO opkaldt efter Lavochkin , den anden hos VNIItransmash . Den tredje kan ses i Museum of Cosmonautics i Peter og Paul-fæstningen - den står i en glasmontre ved siden af modellen af den interplanetære Mars-1-station [6] . Den fjerde hviler på Mars, i krateret Ptolemæus.
| Udforskning af Mars med rumfartøj | |
|---|---|
| Flyvende | |
| Orbital | |
| Landing | |
| rovere | |
| Marshalls | |
| Planlagt |
|
| Foreslået |
|
| Mislykket | |
| Annulleret |
|
| se også | |
| Aktive rumfartøjer er fremhævet med fed skrift | |
{kind=link}
{kind=link}