Begrænset skriddifferentiale (også: begrænset skriddifferentiale (LSD), begrænset skriddifferentiale , selvspærrende differentiale, begrænset skriddifferentiale ) er en differentiale , hvis mekanik, på grund af den strukturelt iboende øgede indre modstand mellem nogle roterende dele, tillader f.eks. et differentiale uden nogen - eller styrehandlinger udefra for selvstændigt at udligne vinkelhastighederne af de drivende og drevne led op til deres fuldstændige gensidige blokering og transformationen af hele differentialet til en direkte transmission.
Det skal erindres, at i den engelske litteratur omtales disse differentialer som "LSD (Limited-Slip Differential)", det vil sige "limited slip differential" (slip), og dette udtryk definerer ikke det fysiske funktionsprincip. af enheden, tilstedeværelsen af friktion, modstand, men også tilstedeværelsen / fraværet af differentiel kontrol osv. Kun funktionen med at blokere en ukontrolleret forskel i drevenes vinkelhastigheder (“slip”) har betydning. "Begrænset slip" indebærer normalt en vis forudbestemt grænse for forskellen i vinkelhastigheder, over hvilken låsen begynder at virke. I nogle implementeringer kan blokering bruges forebyggende, det vil sige selv før akselakslerne har en forskel i vinkelhastigheder.
Den største fordel ved en begrænset intern modstandsdifferens (LDR) kan ses ved at overveje tilfældet med et konventionelt (eller "åbent") differentiale, hvor et hjul slet ikke har kontakt med vejen. I dette tilfælde vil det andet hjul, der er i kontakt med vejen, forblive stationært, og det første hjul, der ikke er i kontakt med vejen, vil rotere frit - det overførte drejningsmoment vil være ens på begge hjul, men vil ikke overstige tærskelværdien for det krævede øjeblik for køretøjets bevægelse, og derfor vil køretøjet forblive stillestående. I konventionelle biler, der kører på asfaltveje, er denne situation usandsynlig, og derfor er en konventionel differentiale ret velegnet til sådanne biler. Når du kører under vanskeligere forhold, såsom når du kører i mudder eller terræn, opstår disse situationer, og tilstedeværelsen af et differentiale med øget indre modstand gør, at du ikke kan stoppe bevægelsen. Ved at begrænse forskellen i hjulenes vinkelhastigheder, overføres det nyttige moment, så længe mindst et af hjulene har trækkraft.
Blokeringskoefficienten er den vigtigste evalueringsegenskab for enhver RPA. I informationsmateriale om RPA kan denne koefficient udtrykkes på to måder og er noget forskellig i betydningen af fortolkning, selvom det i begge tilfælde betyder det samme, kun fra forskellige synspunkter.
I udenlandsk teknisk litteratur er KB normalt udtrykt som en procentværdi i tiere af procent i intervallet 20 % og derover. Tallet angiver bredden af området for relativ drejningsmomentfordeling mellem hjulene/akslerne, der er dækket af en specifik RPA fra den statiske (korrigeret for dens mulige asymmetri) indlejret i differentialet til det maksimale niveau på 100/0, inden for hvilket RPA kan sørge for gensidig blokering. Denne definition falder ind under det engelske udtryk Locking Effect ("blokerende effekt"). I russisksproget teknisk litteratur er KB udtrykt som et tal fra 2 og højere (normalt uden decimalbrøker), hvilket angiver den maksimalt mulige forskel i drejningsmomenter (forskel i trækkraft) på hjulene/akslerne, inden for hvilken en given RPA kan sørge for deres gensidige blokering. Denne definition af KB svarer til det engelske udtryk Torque Bias (“torque shift”).
Selvom begge CB-begreber indebærer forskellige beregningsformler, kan absolut enhver RPA estimeres korrekt af enhver af dem. Samtidig kan hver af de to KB-værdier korreleres med den overordnede estimerede indikator, og der er altid en en-til-en overensstemmelse mellem begge værdier. Så f.eks. betyder værdien af KB = 50% og KB = 3 det samme i begge tilfælde: at RPA med den specificerede KB tillader omfordeling af drejningsmoment mellem hjulene / akslerne i et forhold på højst 75/ 25, hvilket på den ene side giver 50 % af det fulde område af mulig omfordeling af det effektivt anvendte moment (75-25=50), og på den anden side giver en 3-dobbelt forskel i den mulige trækkraft (75/25) =3). Den numeriske (ikke procent) værdi af KB er måske mere intuitiv her, især da den ud over dens hovedbetydning indebærer en lignende forskel i den tilladte adhæsionskraft af hjul/aksler til overfladen, som i samme tilfælde KB = 3 betyder, at den maksimale effektive udnyttelse af motorkraften på denne RPA kun er mulig, hvis grebskraften for hvert hjul med vejoverfladen ikke afviger mere end tre gange.
Et simpelt (gratis) differentiale giver dig ikke mulighed for at få nogen forskel i effektivt brugte drejningsmomenter på de drevne led, her er forskellen mellem trækkraften på begge hjul / aksler praktisk talt nul i nogen tilstande, KB for et sådant differentiale er 0 % eller 1. Direkte transmission eller blokerede differentialer gør det muligt at realisere alt effektivt brugt drejningsmoment på ethvert drevet led, her kan et hvilket som helst hjul/aksel give al trækkraft på et nul niveau af trækkraft på det andet hjul/aksel, og KB er i dette tilfælde 100% eller uendeligt.
RPA'en kan have to øvre KB-værdier, en for hver effektgren. Dette er muligt i tilfælde af en asymmetrisk forskel, når designbureauet modtager en korrektion for asymmetri - det vil sige, at de øvre værdier af designbureauet for hver af siderne adskiller sig fra hinanden med forskellen i forholdet af de anvendte drejningsmomenter (for eksempel i en asymmetrisk bageste knast-krydshjul DPVS på en GAZ-66-lastbil, der nedbryder drejningsmomentet på hjulene i forholdet ≈(60/40), værdierne af KB for højre og venstre hjul er henholdsvis 3.1 og 2.1). Og dette er muligt i symmetriske differentialer, når det er strukturelt tilladt af mekanikken i låseoperationen (for eksempel i det symmetriske snekkegear Torsen Type-1 RPAS, kan forskellige værdier af KB realiseres gennem forskellige skærevinkler af tænderne i hvert satellit-gearpar).
Normalt er CB'en for en bestemt RPA dens maksimale CB. Samtidig har enhver RPA en værdi af den såkaldte initiale KB, som normalt ikke deklareres.
Dette udtryk betyder skabelsen i RPA af intern modstand mod den gensidige rotation af de drevne led i statik, det vil sige i fravær af et drejningsmoment påført differentialet. Værdien af forspændingsniveauet bestemmes af den kraft, der kræves for at skifte (rotere) ethvert differentielt drevet led, når drivleddet er stationært. I et frit differentiale er forspændingsniveauet tæt på nul. Forspændingen, hvis nogen, "virker" altid, uanset om RPAS er belastet med trækkraft eller bremsemoment eller ej. Tilstedeværelsen af forspænding er ikke en forudsætning for driften af RPA.
Den såkaldte "preload clutch" indebærer en bestemt enhed inde i RPA'en, der udfører ovenstående funktioner og gør det vanskeligt for de differentialdrevne gear at rotere indbyrdes. Designet af denne enhed har ikke en universel form og kan være enhver på forskellige RPA. Normalt er disse afstandsfjedre af forskellige former, suppleret med afstandsringe.
To typer RPA er almindeligt anvendt i personbiler:
Differentialer af begge typer giver mulighed for en vis strukturelt programmeret forskel mellem drejningsmomenter (i det første tilfælde) eller vinkelhastigheder (i det andet tilfælde), men pålægger en mekanisk begrænsning for forekomsten af en stor misforhold.
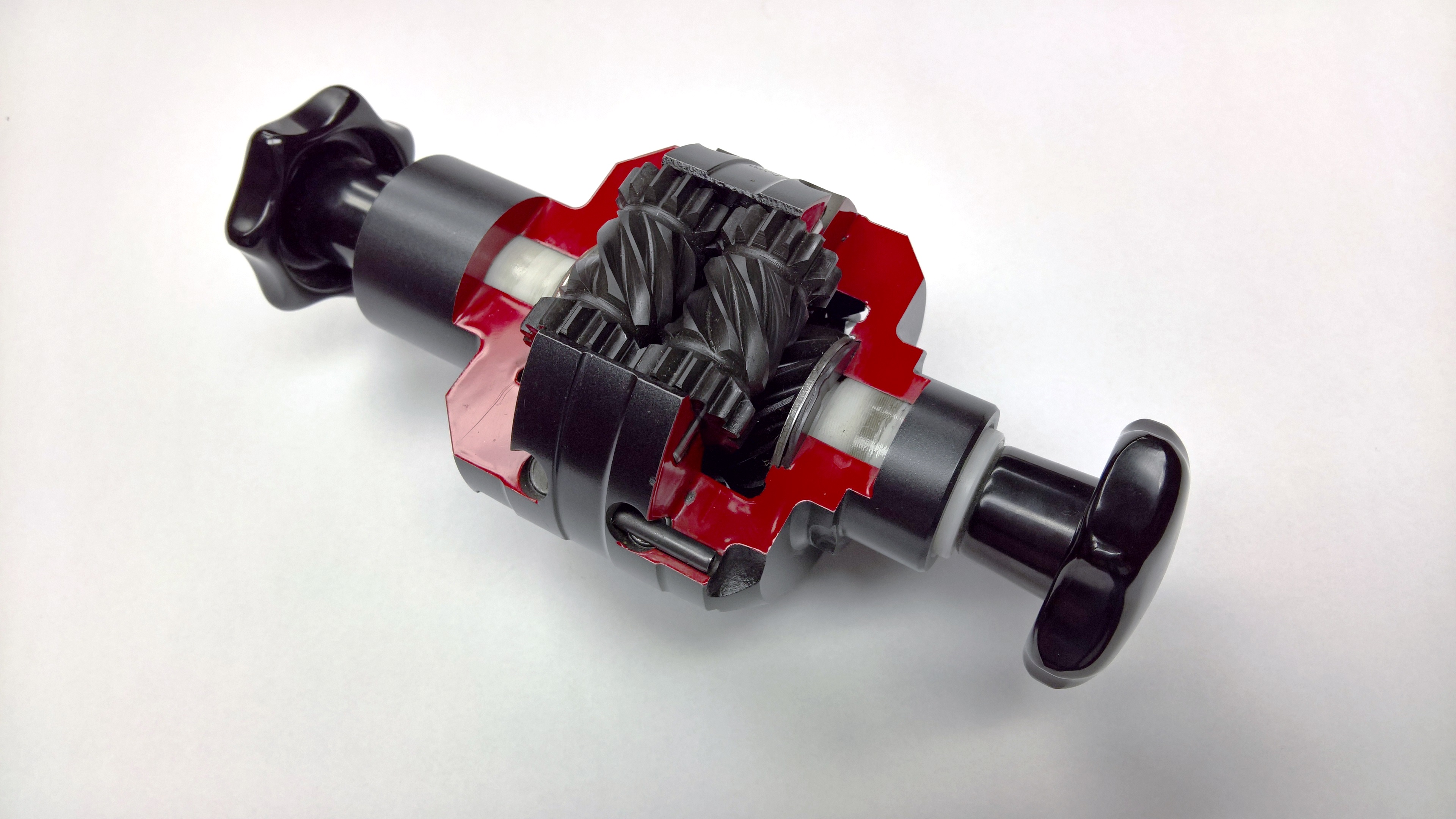
Strukturelt kan skruelåste differentialer laves på basis af en hvilken som helst flad enkeltrækket eller dobbeltrækket planetarisk mekanisme af SHS- eller SVE - skemaer med parallelle akser af satellitter, som til gengæld kan være enten enkelt eller parret sammenføjning. Der vil være to træk, der er fælles for enhver form for ydeevne: brugen af cylindriske spiralformede tandhjul i alle indgrebspar og fraværet af faktiske satellitakser som dele. Helical gear , som sådan, bruges ikke her, og det almindeligt anvendte udtryk kommer udelukkende fra den visuelle lighed mellem differentialdrevene og skruen, især i modsætning til dens hovedgear. Og satellitgearene her roterer ikke på aksler, men i cylindriske lommer fræset i differentialekassen/bæreren. Ideen med blokering er baseret på det faktum, at der ved spiralgear under belastning opstår aksiale kræfter, der har tendens til at skubbe begge tandhjul langs deres akser i modsatte retninger fra kontaktplanet, og her bruges denne egenskab primært i par af sammenlåste satellitter , som til dette modtager en vis aksial mobilitet. Under trækkraft, når de drejer eller glider hjulet, hviler de roterende satellitter, der er kilet i deres lommer, mod enderne af differentialehuset, på grund af hvilket de bremses og selvjusterer vinkelhastighederne af de drevne gear. Satelitternes indkiling er jo stærkere, jo højere drejningsmoment transmitteres af dem, men selve blokeringskoefficienten bestemmes af hældningsvinklen på indgrebstænderne og friktionsegenskaberne for satellit-/huskontaktparrene. For at øge den selvbremsende effekt i disse differentialer bruges tre par satellitter normalt mere end det minimum, der kræves for en flad planetarisk mekanisme - nemlig fra fire til syv par. Og for at forstærke friktionseffekten ved satellitternes kontaktpunkter med differentialhuset, kan afstandsskiver fremstillet af et materiale, der skaber øget modstand mod friktion, bruges. Ved enkeltsatellitter er funktionen af differentialet grundlæggende ens, med den eneste forskel, at her er ikke kun satellitterne, men også differentialets centrale gear involveret i selvbremsning.
På grund af det faktum, at spiralformede gear kan bruges på flade planetgear af enhver ordning og form, kan differentialer baseret på dem laves med næsten alle givne gearforhold i hvert par master-slave-led. Følgelig kan sådanne differentialer være både symmetriske og asymmetriske og kan bruges i transmissionen som både mellemhjul og mellemaksel. Forspænding bruges aktivt på disse differentialer, og blokeringsmomentet her skabes i træktilstand selv i fravær af forskel i vinkelhastigheder ved udgangen. Men udelukkende på spiralgear er høje værdier af låsekoefficienten ikke tilgængelige (normalt < 3), og for at forstærke effekten kan sådanne differentialer suppleres med friktionspakker som skivelåste differentialer.
Skruelåse differentialer er meget almindelige i dag. Deres hovedanvendelsesområde er sports- og racerbiler. De bruges også som tuning for en lille forbedring af åbenhed i vejbiler. Men på ægte terrængående køretøjer bruges de normalt ikke. De mest kendte prøver er fra det britiske firma Quaife Engineering og amerikanske Torsen NA Inc. . I det første tilfælde kaldes differentialet - Quaife . I det andet tilfælde er der tale om de såkaldte Torsen Type-2 og Torsen Type-3 .
Strukturelt er alle ormlås-differentialer lavet på basis af simple rumlige planetmekanismer i SVS - skemaet med satellitter på krydsende aksler . Visuelt ligner sol-satellit-indgrebsparrene her et snekkegear , hvor akserne på snekkehjulet og selve snekken også er vinkelrette på hinanden og ikke skærer hinanden. Både satellitter og drevne gear kan fungere som en snekke og et snekkehjul, og der er udviklinger af en snekkelås med begge muligheder for at fordele roller mellem gear. Idéen med blokering er baseret på det faktum, at et snekkegear er kendetegnet ved selvbremsning i tilfælde, hvor kraften ledes fra snekkehjulet til ormen, som er jo stærkere, jo større hældningsvinklen på snekketænderne er. til sin rotationsakse.
Selvom snekkelåsdifferentialet er mest kendt i varianten udviklet af amerikanske Torsen NA Inc. , - den såkaldte Torsen Type-1 - udviklingsselskabet selv undgår af en eller anden grund udtrykket "snekkegear", når de beskriver sit differentiale. Geartoget her er erklæret som spiralformet på krydsende akser, men ikke kun spiralformet, men med nogle specifikke, udviklet af Torsen selv og patenteret af dem Invex™-tandform , som faktisk er en privat version af involut gearing . I den russisksprogede ingeniørlitteratur antages det, at i Torsen Type-1 spilles ormenes rolle af drevne tandhjul, og rollen som ormehjul er satellitter. Forklaringen på dette stammer fra den forskellige hældningsvinkel af den spiralformede skæring på de drevne tandhjul og satellitter. Satellittens usædvanlige tre-rækkede form med cylindrisk gearing langs kanterne og skrueformet gearing i midten forklares udelukkende af det faktum, at det på grund af layoutet med krydsende akser er strukturelt umuligt at organisere gennem det samme gear, der skærer den samtidige indgreb af både satellitter med drevne gear og satellitter indbyrdes, og for at øge den interne modstand af differentialet, er denne funktion irrelevant. Begge drevne gear har her co-directional skæring af tænder og en vis minimal aksial mobilitet, hvilket, som i tilfældet med skruelåste differentialer, er nødvendigt for at skifte begge gear langs aksen under belastning, kun i dette tilfælde ikke for kontakt med boliger, men for deres gensidige selvbremsning af hinanden, hvilket giver et væsentligt bidrag til den samlede stigning i indre modstand. Momentfølsom differentiale. Blokeringskoefficienten i forskellige versioner er 3-6. Differentialet er visuelt og kinematisk symmetrisk, og i tilfælde af et interakseldifferentiale blev det brugt på modifikationer af AWD -biler, oprindeligt forhjulstræk. Generelt er Torsen Type-1 en af de mest kendte RPA-modeller. Den blev meget brugt i WRC- og Formel 1-racerbiler fra forskellige år, både som mellemhjul og som interaksel. Og på landevejsbiler er det blevet en helt entydig forening med firehjulstræksystemer fra Audi – Quattro – selvom Audi har brugt andre muligheder i den seneste udvikling. Blandt terrængående køretøjer er Hummer H1 en velkendt bærer af denne RPA .
De rigtige snekkelåste differentialer med høje (i størrelsesordenen 10 og endnu højere) låseforhold var amerikanske og tyske designs til terrængående lastbiler. I dette tilfælde antog designet af RPVS planetmekanismen tredobbelt låste satellitter, hvoraf to satellitter var orme, og en var et ormehjul. Også drevne gear var snekkehjul, og i alt var der 8 snekke og 6 snekkehjul i to størrelser i differentialet. De vigtigste forsøg med hensyn til massebrug af disse RPA'er fandt sted i førkrigsårene. I USSR blev denne type RPA testet efter krigen, både i form af trofæer fra Rheinmetall-Borsig AG , og i form af hjemmeudviklinger af et "forbedret" design baseret på det tyske. Ingen data er tilgængelige for specifikke amerikanske og tyske transportører, selvom snekkelåste differentialer menes at have været almindelige på forskellige terrængående og stenbrudslastbiler og traktorer. I USSR er den eneste mere eller mindre massebærer Ural-375D . Moderne brug er sandsynligvis nul.
Strukturelt består et skivelåst differentiale altid af en planetarisk mekanisme i SHS -skemaet på vinkelgear, suppleret med et par koniske miniaturefriktionskoblinger og et par flerpladefriktionspakker placeret langs differentialets akse på begge sider mellem de drevne gear og huset. Nogle af friktionsskiverne her er i indgreb med differentialehuset, og nogle er i indgreb med en miniature kegleformet kobling, som passer til hver sit drevne gear (sol). Ideen med blokering er baseret på det faktum, at der under belastning opstår aksiale kræfter i de koniske tandhjul, som har en tendens til at skubbe de gearede gear fra hinanden, og i modsætning til et frit differentiale, hvor de forsøger at udjævne denne effekt, er det netop på grund af det, at friktionspakkerne mellem de drevne tandhjul og differentialhuset komprimeres, hvilket igen fører til justering af vinkelhastighederne. Foruden koniske koblinger og friktionspakker bruges her ofte en afstandsfjeder for at forstærke effekten, installeret mellem de drevne gear. Og for at forstærke effekten har disse differentialer normalt ikke to, men fire satellitter på den korsformede bærer.
Udviklingen af sådanne forskelle har været kendt siden førkrigstiden - de amerikanske firmaer LeTurno-Westinghouse og Borg Warner var engageret i dem. Differentialer fik deres moderne udseende og skivelås i 60'erne, hvor der dukkede relativt pålidelige friktionsmaterialer op, som gjorde det muligt at gøre hele systemet kompakt og velegnet til biler. I dag bruges de som tværaksler i de bagerste drivaksler på både sports- og terrængående køretøjer. Pålidelig, men kan kræve tilpasning over tid.
Strukturelt er der to muligheder. I et tilfælde er en knastkobling , bestående af to knastskiver og en mellemadskiller med krakkere , placeret mellem begge drevne gear af et frit differentiale. I det andet tilfælde har differentialets planetgear slet ikke gear: separatorringen fungerer som differentialets ersatzbærer, satellitterne er krakkere, og de drevne gears rolle udføres af to knastskiver eller ringe med en bølget profil af overfladen, der passer til separatoren. I begge tilfælde er ideen om blokering baseret på det faktum, at med en vis forskel i vinkelhastighederne for de drevne led, er krakkerne kilet fast mellem knastskiverne eller ringene og næsten øjeblikkeligt blokerer differentialet. Blokering her virker kun på forskellen i vinkelhastigheder. Op til en vis værdi af denne forskel fungerer differentialet som et frit, når det når det, blokeres det øjeblikkeligt, og det er lige meget om det er belastet med moment eller ej. Der er ingen overgangsmåde for delvis blokering mellem den frie og blokerede tilstand.
Den første kendte udvikling af knastdifferentialer er sandsynligvis af Ferdinand Porsche . Det var hans differentiale, der gik i serie på KdF-Kübelwagen- maskiner . I dag bruges selvlåsende knastdifferentialer hovedsageligt som mellemhjulsdifferentialer i terrængående køretøjer og i militært udstyr (pansrede mandskabsvogne mv.).
Strukturelt set er kuglelåste differentialer en slags ersatz planetgear af det symmetriske SHS -skema . Formelt har de hverken gear eller satellitter i deres design, men faktisk er funktionerne af deres bestanddele og det generelle princip for deres drift identiske med designet og funktionsprincippet for enhver virkelig planetarisk differentiale, og låsemekanikken er bestemt ved en stigning i den indre modstand mod arbejde, som i andre typer af selvlåsende differentialer. I rollen som satellitter bruges her kugler, som er tæt pakket ind i løkkede riller i huset (bæreren) af differentialet, og som ligesom rigtige satellitter er i kontakt med hinanden samtidigt og med et par drevne ersatz gear (to sole). Med en lille forskel i vinkelhastigheder bevæger kuglerne sig, der skubber hinanden, i den løkkede rille i den ene eller anden retning, hvilket giver differentiel rotation af hele strukturen. Når et vist niveau af forskel i de drevne gears vinkelhastigheder (slip) er nået, kan kuglerne ikke opretholde det (forskellen), på grund af friktion bremser de selv i deres riller og skaber derved en blokerende effekt.
Dette design er lidt kendt i den globale bilindustri, og dets distribution er sandsynligvis begrænset til Rusland og Ukraine. De mest berømte kuglelåste differentialer er Krasikov Automatic Differential og Nesterov Automatic Differential.
Strukturelt består differentialet af en simpel planetmekanisme af absolut ethvert kredsløb og en viskøs kobling , der forbinder to af dens led (hvilke som helst to strømforsynings-/fjernelsesaksler). Den viskøse kobling kan være placeret både inde i differentialet og forbinde to drevne led, eller udenfor og forbinde de drivende og drevne led (placeringen af den viskose kobling påvirker ikke den grundlæggende funktion af hele systemet). Ideen om blokering er baseret på egenskaberne af en viskøs kobling for at udligne vinkelhastighederne af dens to led på grund af egenskaberne af en dilatant væske. Blokering udløses kun af forskellen i vinkelhastigheder. 100 % blokering er tilladt i kort tid. Overgangstilstande bruges også aktivt.
Viskøse RPA'er er mindre effektive end de førnævnte mekaniske RPA'er, fordi de spreder energi. Især resulterer enhver permanent belastning, der opvarmer væsken inde i koblingen, i et permanent permanent tab af "differentiel effekt". [en]
Denne RPA må ikke forveksles med brugen af en viskøs kobling i såkaldte firehjulstræksystemer efter behov .
I differentialer af denne type roterer gerotorpumpens krop på den ene side , og på den modsatte side roterer en aksel forbundet til et tandhjul inde i pumpen. Når der er forskel i rotationsfrekvenserne for huset og gearet, komprimerer pumpen arbejdsvæsken i pumpens indre hulrum. Dette sikrer overførsel af drejningsmoment til maskinens hjul, som har et stærkere greb. Pumpebaserede systemer har øvre og nedre trykgrænser og intern dæmpning for at undgå hysterese . De nyeste systemer med gerotorpumper har computerstyret effekt, som giver større mobilitet og eliminerer svingninger.
Udviklingen af elektroniske systemer i biler har gjort det muligt at styre blokeringen af akselakslerne ved hjælp af elektroniske styreenheder (ECU'er). Disse systemer bruger nødvendigvis forskellige sensorer.
Det første trin var brugen af ABS-sensorer til at bestemme forskellen i vinkelhastigheden af de glidende hjul og derefter tvinge brugen af bremsesystemet til individuelt at bremse hjulet, der roterer med for høj hastighed - og, derved omfordele momentet mod det modsatte hjul gennem det frie differentiale . Funktionen af et selvlåsende differentiale i sådanne køretøjer efterlignes, selve differentialet forbliver klassisk frit, og derfor er en sådan løsning ret billig, forringer ikke bilens parametre og kræver ikke særlig vedligeholdelse. Sådanne systemer er under ét blevet omtalt som " anti-slip ". Faktisk er de en mere avanceret udgave af ABS-systemet, som ikke kun virker under opbremsning, men også under bevægelse og acceleration. Bruges også som en del af et mere globalt system til at "stabilisere" bilens karrosseri på vejen under udskridningsforhold. Disse systemer er dog begrænset af bremsesystemets ydeevne, der er tilbøjelige til overophedning ved kontinuerlig drift og efterfølgende tab af effektivitet. På fuldgyldige terrængående køretøjer bruges normalt ikke.
Anden fase var introduktionen af elektroniske styresystemer med friktionskoblinger implementeret på hver akselaksel. Sådanne koblinger kan være åbne, når der køres med tilnærmelsesvis lige store vinkelhastigheder, eller omvendt, lukket for konstant drejningsmomentoverførsel svarende til FullTime 4WD, men når elektronikken bestemmer situationen for glidning, og også for at forhindre det, reduceres de nødvendige koblinger med en beregnet kraft, der overfører mere drejningsmoment til en mindre bevægelig aksel. Det bruges for eksempel i Haldex-4, VTM-4 systemer. De kan implementeres både ved hjælp af elektriske koblinger og hydrauliske, hvortil der bruges en elektrisk pumpe.
Den tredje fase i udviklingen af sådanne differentialer er den såkaldte. " aktive differentialer ", hvor der i stedet for at blokere tilførslen af drejningsmoment anvendes konstant styring af fordelingen af tryk mellem akselakslerne. I en række implementeringer, såsom Honda SH-AWD, er bagdifferentialet kun implementeret funktionelt, uden den mest klassiske differentialemekanik, og er helt afhængig af elektronisk styring af trækkraft og baghjulshastighed. I dette tilfælde bruges hele det moment, der overføres til denne aksel, uden bremsetab, det omfordeles kun mod den mindre glidende aksel. Samtidig bliver det muligt at øge kontrollerbarheden ved drejning, på grund af overførsel af øget drejningsmoment til den udvendige akselaksel, og endda med en stigning i vinkelhastigheden større end normalt, på grund af en gearkasse med et yderligere stigende antal. Hvis nogen af sensorerne, der bruges af sådanne systemer, svigter, stopper trækkraften til akslen, eller funktionaliteten falder. Desuden kan systemet slukke sig selv, for eksempel ved overophedning.
{kind=link}
{kind=link}
{kind=link}